文章
18
标签
3
分类
21
首页
文章
归档
分类
标签
页面
友链
说说
每日60秒
留言板
关于
阿波的博客
做了一个能听懂人话的巡检机器人
返回首页
首页
文章
归档
分类
标签
页面
友链
说说
每日60秒
留言板
关于
做了一个能听懂人话的巡检机器人
发表于
2025-09-06
|
更新于
2025-11-11
|
DIY
ROS
路径规划
|
总字数:
65
|
阅读时长:
1分钟
|
浏览量:
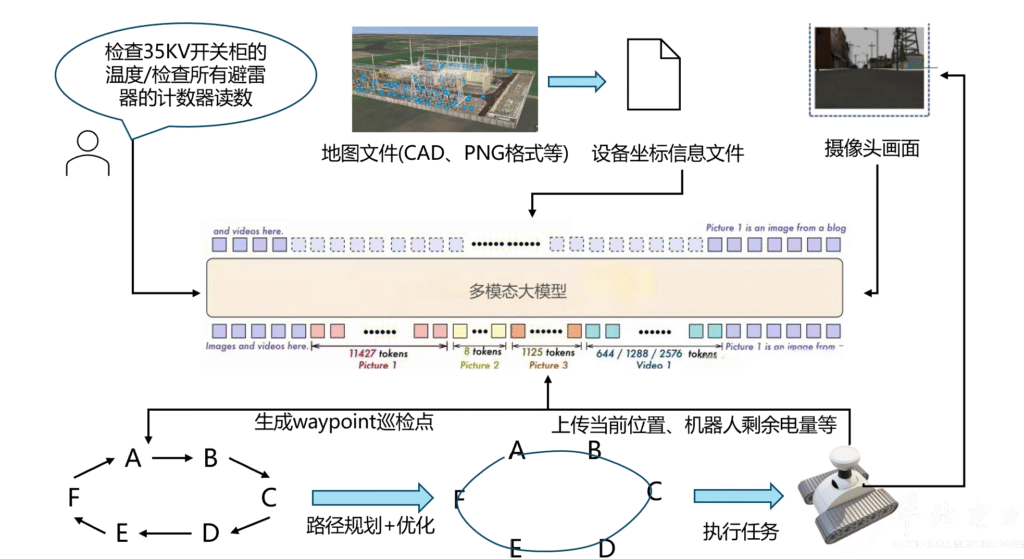
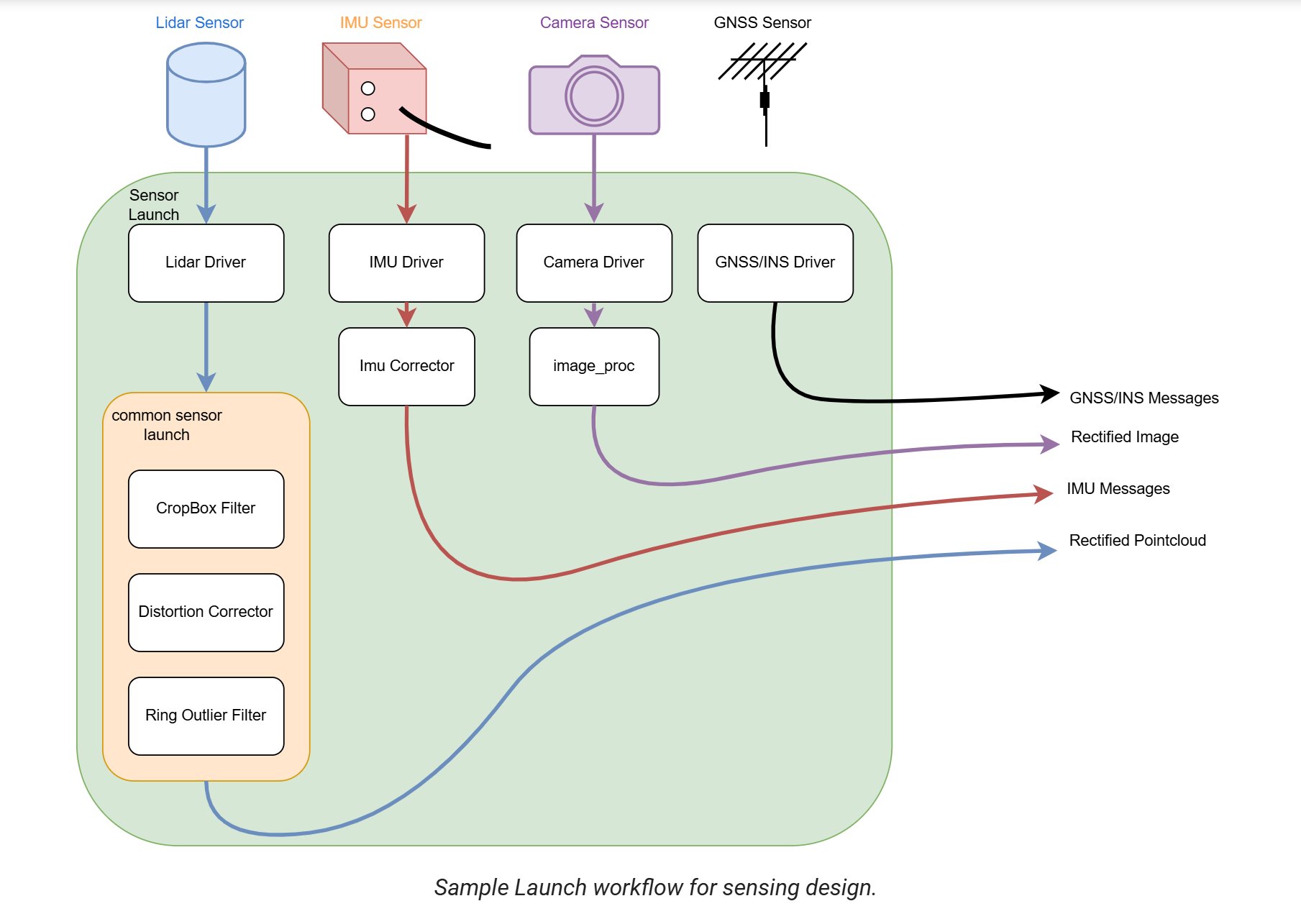
总体实现框架图:
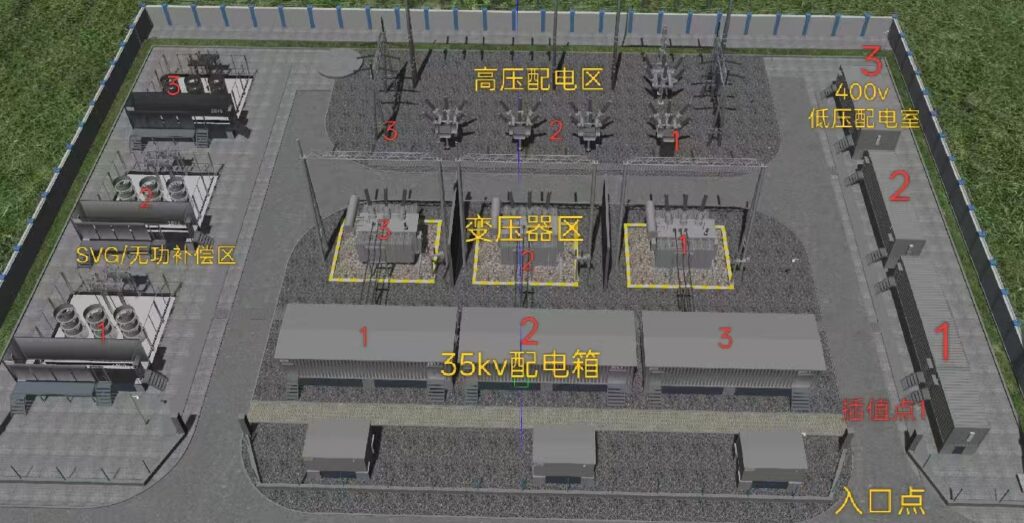
找了个实际的变电站环境,改动了一下导入到了Gazebo中用作实验的仿真环境
目前有了一个初步的demo,等做完后开源并对算法进行详细的讲解
文章作者:
Abo
文章链接:
https://leo-wangbo.top/p/%E5%81%9A%E4%BA%86%E4%B8%80%E4%B8%AA%E8%83%BD%E5%90%AC%E6%87%82%E4%BA%BA%E8%AF%9D%E7%9A%84%E5%B7%A1%E6%A3%80%E6%9C%BA%E5%99%A8%E4%BA%BA/
版权声明:
本博客所有文章除特别声明外,均采用
CC BY-NC-SA 4.0
许可协议。转载请注明来源
阿波的博客
!
上一篇
差速机器人微分平坦可行性代价梯度推导
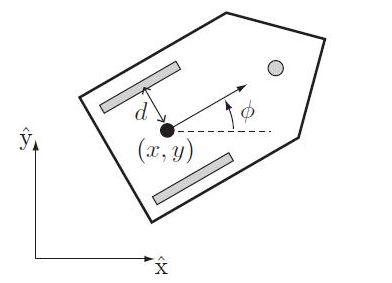
大名鼎鼎的ego planner规划期在无人机领域大放异彩,实机表现也令人眼前一亮,好几年了一直都是主流的无人机规划器,于是想到将其改成二维可用与地面机器人,但是不能简单只改一个维度,地面机器人多为非完整欠驱动系统,不像无人机一样可以任意维度横移倾转,需要进一步限制轨迹的角速度、曲率等,于是下面以差速无人车系统为例引入差速机器人微分平坦可行性代价梯度推导。 基础定义与公式 微分平坦模型 (Differential Flatness Model) 先列出差速车辆的运动学方程: {x˙=vcosθ,y˙=vsinθ,θ˙=ω,\begin{cases} \dot x = v\cos\theta,\\\\ \dot y = v\sin\theta,\\\\ \dot\theta = \omega, \end{cases} ⎩⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎧x˙=vcosθ,y˙=vsinθ,θ˙=ω, 差速车辆运动学模型图 我们选择车辆后轴中心的位置 p(t)=[x(t),y(t)]T\bm{p}(t) = [x(t), y(t)]^Tp(t)=[x(t),y(...
下一篇
Autoware中topic_state_monitor模块调研
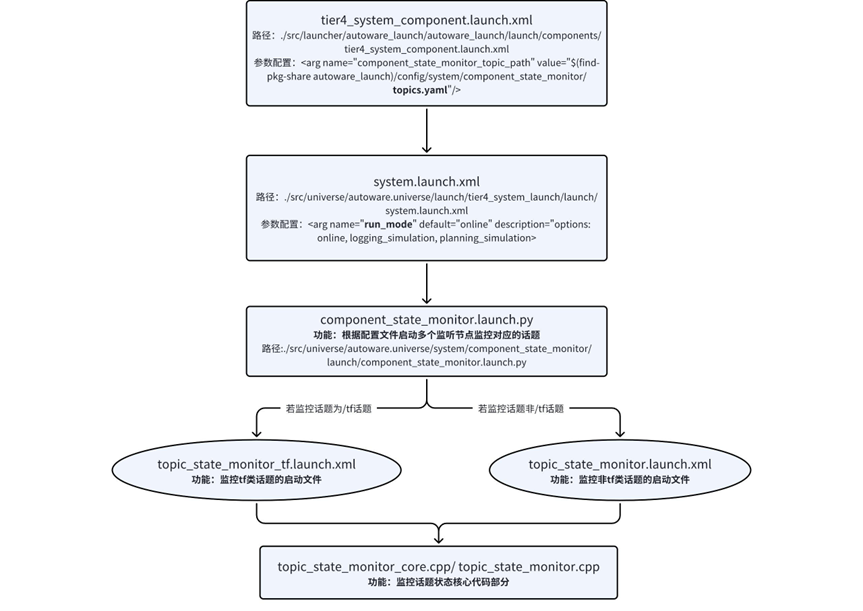
一、topic_state_monitor模块简介 此节点用于监控任意话题是否存在异常,例如超时和低频率。话题的诊断结果将通过ROS Diagnostics发布诊断信息。 输入:任意名称、任意类型的话题 输出:/diagnostics 诊断信息 二、topic_state_monitor模块启动流程 通过解析 topic_state_monitor 核心代码部分并逐级向上追溯,可得到 topic_state_monitor 模块完整的启动流程,如下图所示: 上层的两个 .launch.xml 文件主要配置了两个参数。一个是 tier4_system_component.launch.xml 中配置的 topics.yaml 文件路径。topics.yaml 文件内容是配置所有需要监控的话题信息以及监控阈值信息。配置文件的内容示例如下: 1234567891011121314151617181920212223242526272829303132333435- module: control mode: [online, logging_simulation, plan...
评论
Abo
卧龙凤雏团队欢迎你
文章
18
标签
3
分类
21
GitHub
公告
欢迎来到阿波的博客 🎉 已从 WordPress 迁移到 Hexo + Butterfly
最新文章
差速机器人微分平坦可行性代价梯度推导
2025-11-10
做了一个能听懂人话的巡检机器人
2025-09-06
Autoware中topic_state_monitor模块调研
2025-03-09
Autoware.Universe适配实车教程
2024-08-17
Autoware.universe完整部署步骤(踩坑版)
2024-08-11
微信扫一扫
点击空白处关闭
QQ 扫一扫
点击空白处关闭